滁州优质全自动打包机加工
发布时间:2021-12-04 00:30:55
滁州优质全自动打包机加工
有哪些配备设备呢?就是厂家可以为您提供什么样的配套产品,有些时候,同厂家相配套的产品会对机器的伤害降到zui低,还有就是您选择的时候,尽量找那种操作简单,维护方便的,配件等完善的,对您来说可以在很大程度上减少您不必要的麻烦。后还有一点一定不容忽视,那就是厂家的售后服务问题。因为只要是机器就难免会出故障,厂家如果可以及时为您解决遇到的问题,这样子也可以免去您的后顾之忧。建议您购买等包装设备的时候,多了解几家做个对比,选择性价比高的,信誉好的,质量有保证的,售后服务及时的厂家购买!

滁州优质全自动打包机加工
使用行业:酒行业、饮料行业以及化妆品行业等瓶盖装配。啤酒盖、茅台瓶盖、饮料瓶盖、油瓶盖、塑料瓶盖以及各种药盖等的组装。佛山市欧德意塑料科技有限公司是集研发、生产、销售、服务为一体的专业容器包装辅助智能设备的制造企业。公司拥有经验丰富的研发团队,稳定的生产队伍,为广大客户提供性价比高的产品。主要产品有水口剪切设备系列(Pet瓶胚剪尾机,Pe自动切口机,Pet膏霜钻尾机),自动打包机系列(瓶子自动套袋机,,瓶子堆叠打包机),系列(自动入垫机自动翻盖机压盖机)等,根据客户的实际需求,提供从方案设计、生产研制、安装调试、技术培训到售后服务的整套解决方案。欧德意产品遍及全国,并远销欧美、中东、东南亚、非洲等三十多个国家和地区,赢得国内外客户的信任和支持。欧德意公司将始终以“诚信,质量,实干”为宗旨,一如既往地为医药、日化、食品、化工等行业,提供卓越的产品、可靠的质量及完善的售后服务。

滁州优质全自动打包机加工
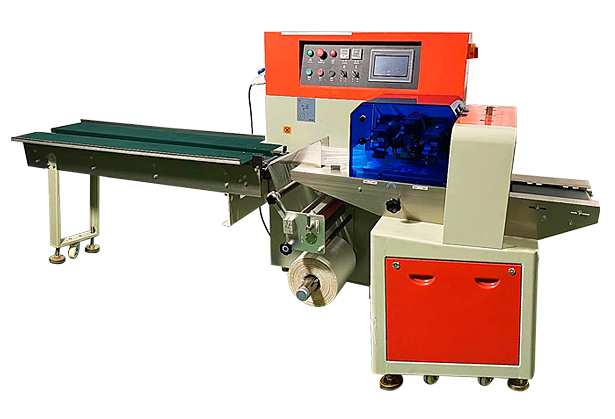
又称为收,通常是将产品用热收缩薄膜裹包后再进行加热,使薄膜收缩后裹产品的机器。简介又称为收缩包装机,通常是将产品用热收缩薄膜裹包后再进行加热,使薄膜收缩后裹产品的机器。它利用热收缩膜在受热状态下,原分子之间不规则的排列发生了变化,在红外线等热辐射下,塑料分子重新紧密排列,从而使原有面积大大缩小,紧附于产品表面达到包装目的.收缩机收缩过程中,不影响包装物的品质,而能收缩快速完美,包装后的产品能密封、防潮、防撞击、适用于多件物品紧包装和托盘包装.

滁州优质全自动打包机加工
以上主要描述的就是的工作原理,那么在使用的工程之中我们应该要注意哪些事项呢?1.请确认所使用的电源,勿插错电源.本机采用三相四线制.花线为接地零线,作漏电保护。2.操作时请勿将头手穿过带子的跑道.3.请勿用手直接触摸加热片.4.勿用水冲洗机器,工作场所潮湿时,操作人员请勿赤脚工作.5.不使用时请将储带仓内的带子卷回带盘,以免下次使用时变形.6.输带滚轮表面请勿粘油7.机器不用时切记拔掉电源.8.勿随意更换机器上的零件。9.主要零部件要经常用油润滑。

滁州优质全自动打包机加工
在市场上,各色机械手臂产品一应俱全。不象其它设备,不易于被归类和作评估:不同的轴、行程、不一致的规范、以及有限的工业标准,都使得比较变得很困难。潜在买家可以借助一些指南来做出明智的决定。要有效比较不同的东西,就由基本要素开始;通过了解基础的东西,你就能在选择机械手时作出明智的选择。多大的行程?机械手行走的距离就是为人熟知的行程,它的大小与部件尺寸、下降位置和机器形状有关系。为了简便,这个距离通常按三轴定义:在本文我们将利用X、Y和Z三。请注意并不是所有的制造商都是以这种方式来定义行程。一些定义轴的方法不同,而另一些采用了不同的命名习惯。X轴。 这个距离一般叫做反冲行程,其大小和部件厚度有关。例如为了操纵一只水桶,要伸出机械手,并把桶子从模具中拉出,就需要足够的行程。Y轴。这个距离定义为垂直行程,是由机器高度和所需下降高度所决定的,也就是说,机械手必须足够的高,以使部件能跳过机器,又要足够的低,从而能在离地面合理的高度上放下部件。Z轴。 来回移动行程的大小有赖于机械手是在机器侧边还是在后边将部件放下。利用这种行程的部件只是为了跳过机器。确定所需行程的简易方法是画出布局图。布局不仅确定出每一个行程,并且在平面规划图上确定出重要的事项,例如****设备、支撑柱和空隙区。机械手操纵多重的物品 ,有效载荷是机械手能处理的重量,并被定义如下:有效载荷=部件重量+臂端工具重量部件重量常因某一特定用途而为人所知;但是,臂端工具就不是这样。臂端工具的重量可估计出来,并能从供应商处获得。转矩比有效载荷更为重要。转矩的定义是一个力绕一个轴形成扭转和旋转的趋势,是有效载荷与对机械手枢轴点的距离的函数。为确保机械手能操纵部件,要比较实际转矩和机械手能支持的可用转矩。
滁州优质全自动打包机加工
是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到极其重要的作用。的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。控制系统则是通过对驱动系统进行控制,使执行系统按照预定的工艺进行操作,以简易机械手的控制系统为例:人机界面↑↓注塑机开模完信号 ←→ 单片机←→ 注塑机机械手信号↑↓各类阀信号↑↓执行气缸 操作者通过人机界面进行操作,在机械手收到注塑机给出的可执行信号时,机械手切断注塑机的可关模信号,确保机械手取物的安全性,在完成取物后机械手恢复注塑机的动作。控制系统的设计难点在于机械手与注塑机的协调工作关系。在控制系统的指挥下,机械手按照预定的工作程序完成各个动作,从而将注塑生产出的制品从模具中取出并传送到指定地点或下一个生产工序中。在设计时,应根据注塑机的性能、机械手的作业条件和要求、制品的形状和重量等来确定控制系统。